Phurin Nararat
Automation Engineer | Aspiring Full Stack Engineer
Eager to keep learning and loves to code.
View Full ResumeAbout
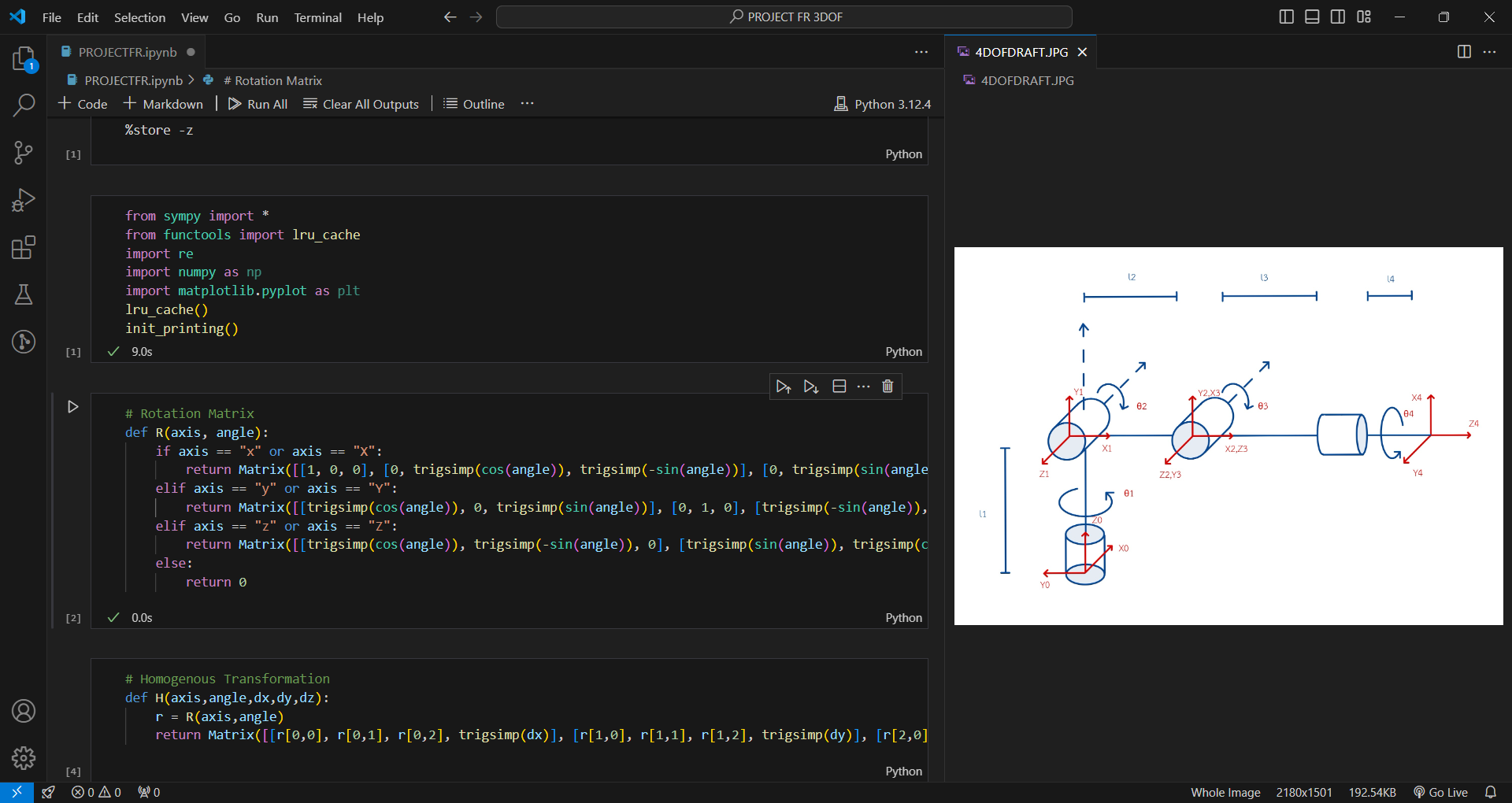
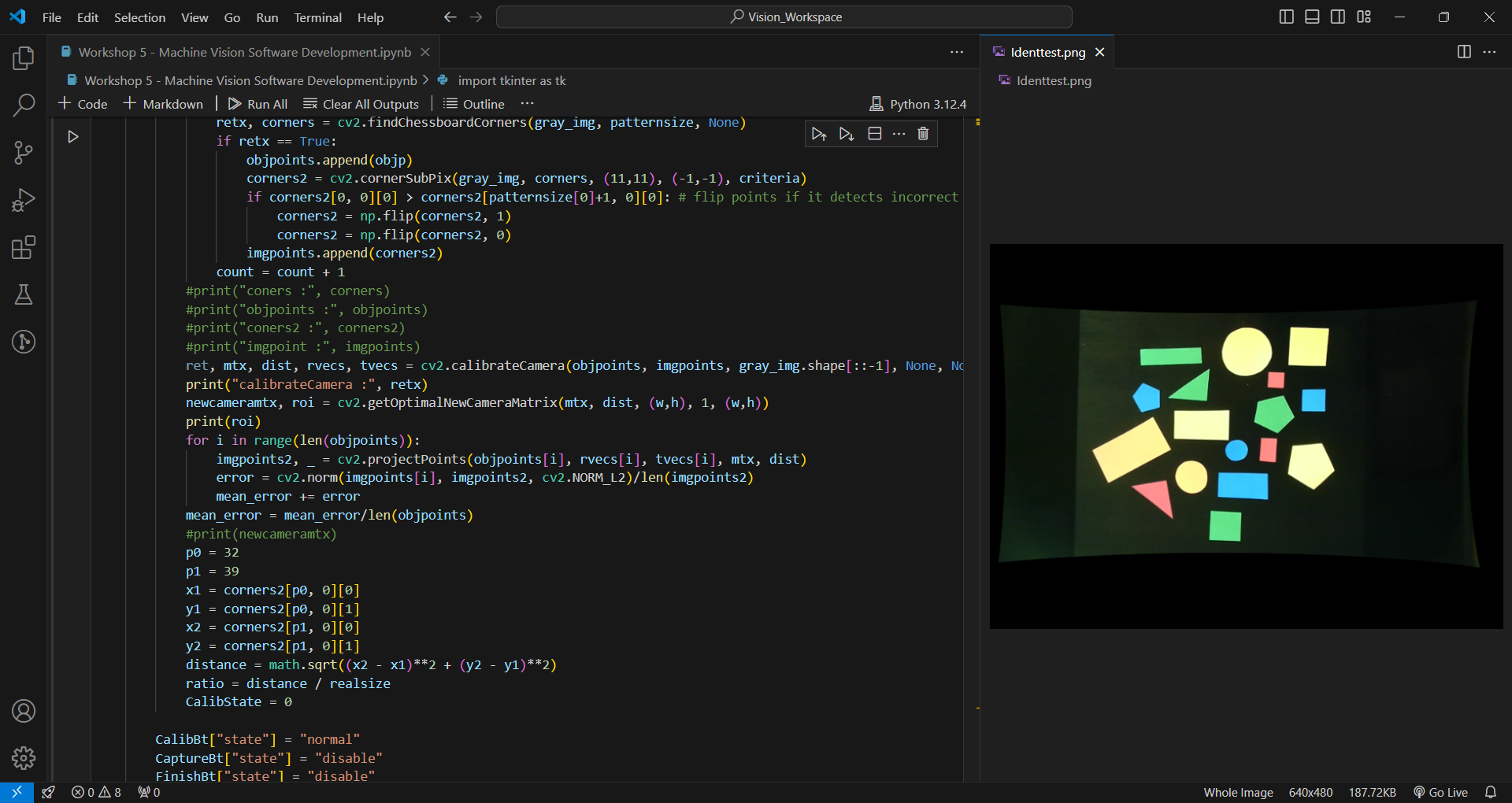
My journey into the tech world began during my college years, where I studied robotics and automation system engineering. I first learned C programming as my foundational programming language. Driven by my interest, I later learned Java and Python. I have programmed various microprocessors, controllers, single-board computers, and robot manipulators. I find coding in different programming languages enjoyable because it is logical, much like mathematics. However, I did not have ample time to fully explore it due to the demands of other departmental subjects.During my final year of study, I had the opportunity to intern at Mitsubishi Electric Factory Automation Thailand (MELFT). Here, I worked on SCADA system design, encompassing both frontend (UI) and backend (transaction, SQL, AWS IoT, etc.) development. This experience felt similar to full-stack development.After graduating, I got a job in the field of automation, working on logistics and robotics at Somboon Siasun Tech (SST). During my time there, I used my programming skills to help automate the commissioning and testing workflows for the systems my team and I installed onsite for customers.Nowadays, I have decided to transition into the tech world and aim to become a full-stack engineer. I want to work in a field I love and continue learning.
Education
Experince
JUN 2023 — JUL 2024
AUG — NOV 2022
Projects

Inspiration from Brittany Chiang and coded in Visual Studio Code. Built with Next.js and Tailwind CSS, deployed with Vercel.